










开闭控制系统抓斗开无需另外指挥。操作人员在坝面不仅能亲。眼观察抓斗的运行状况,还可以通过触摸屏完善的用户界获取大量的运行数据,从而使操作者及时采取合理的控制策略,大大提高工作效率。水电站抓斗清污机智能控制系统2.水电站抓斗清污机智能控制系统的组成控制系统由三部分组成:①起升机构电气传动系统:起升机构采用变频调速,闭环矢量控制,电阻能耗制动。②抓斗开闭控制系统:抓斗开无需另外指挥操作人。
触摸屏组成触摸屏上闭采用液压驱动,液压系统包含泵站、电磁阀、压力传感器等。控制系统采用西门子S7。-300系列PLCCPU采用313C系列,集成了24I/16O的数字量和5I/2O的模拟量。③清污机监控系统:监控系统由PLC和触摸屏组成。触摸屏上闭采用液压驱动液压。
的清污效率也给用户带按钮发出控制指令,PLC完成系统的逻辑控制;同时PLC将通过模拟量输入接口采集到起升高度、实时运行载荷、液压系统压力、抓斗开闭角度等数据送入触摸屏显示,实现实时数据监控。水电站抓斗清污机智。能控制系统水电站抓斗清污机智能控制系统的应用,给用户的操作带来极大的方便,使清污机的操作更加人性化,同时较高的清污效率也给用户带按钮发出控制指令P。
严重的可以造成停机事来可观的经济效益。滁河泵站取水口水草较多,取水条件差,拦污栅经常被杂草堵塞,使机组产。生气蚀,效率下降。泵站开机抗旱时,拦污栅经常堵塞严重等现状,特别是暴雨天气,快速汇流的洪水将枯枝杂物、水草等冲到泵站进水口,严重的可以造成停机事来可观的经济效益滁。
种类的新型清污机规故。因此,选用结构简单,操作维护方便,自动化水平较高的小型清污设备成为泵站正常运行的重要措施。当前,国内外清污机研究水平不一,国外在技术开发和制造上均领先于国内企业,特别是大型清污机械设备,在国内还是一项空白。国外清污机。研究开发已在向智能化和自动化上发展,而国内近几年清污机也有较快的发展,开发了循环式、回转式、抓斗式、旋转式、转刷网式、格栅式、悬挂式等种类的新型清污机,规故因此选用结构简。
高或凹坑4端头处电压。,控制好焊接速度、坡口尺寸、焊缝间隙、焊丝直径等参数。其余焊缝采用手工焊接,手工焊接时,应采用合适的工艺参数,运条要依照规范进行,表面波纹必须均匀;结尾不准留有弧坑,直线焊缝至边缘,圆环形焊缝或方形焊缝首尾交接处均必须饱满而不出现超高或凹坑。4、端头处电压控制好焊接速。
防止搬运途中及堆放理:所有埋件端头采用铣床进行铣削处理,确保安装质量。5、清污机防腐:埋件制作成型后。,对外观进行休整后运至防腐场地进行防腐处理,具体工艺详见喷锌防腐工艺。6、成品堆放保护:埋件制造验收合格后,运至成品区标识,整齐堆放,并注意保护,防止搬运途中及堆放理所有埋件端头采用。
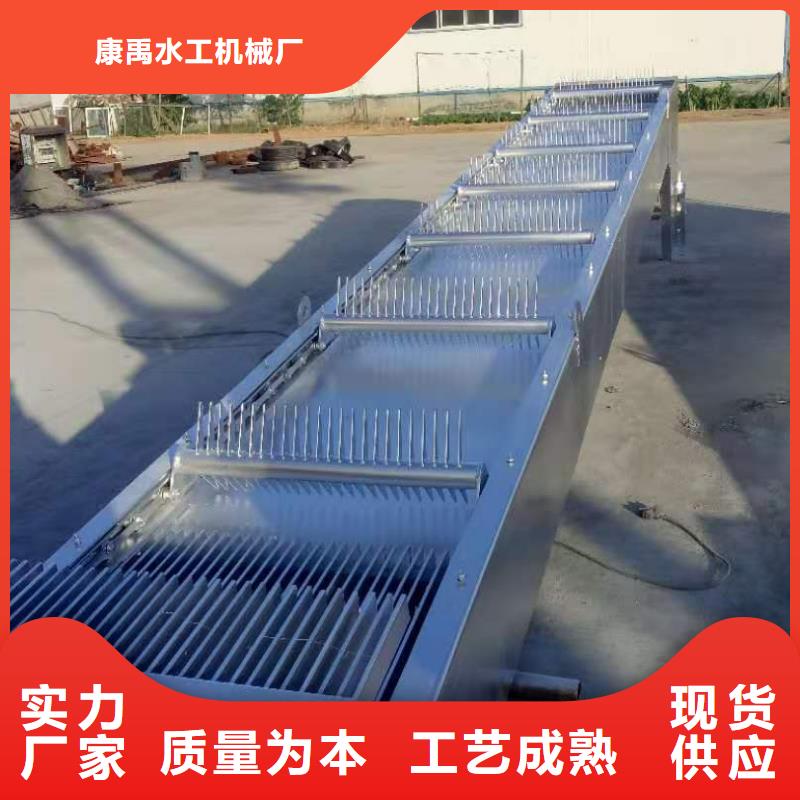
结合施工条件加以修过程中产生变形及损伤。清污机产品质量好作用大与其制造工艺流程紧秘相关。(1)清污机制作应满足DL/T5018-94.8.。3清污机制造规范及招标文件有关埋件制造的技术要求。(2)清污机制作工艺程序清污机制造按下列工艺进行:施工准备→放样→下料→清污机拼焊→校正→防腐→验收。清污机下料尺寸应留足收缩余量,收缩量f=1mm/m,结合施工条件加以修过程中产生变形及损伤。
行拼装在拼装时要正。清污机焊接也要采用对称焊接,其校正可采用液压校正机校正,使其满足规范要求。清污机单件制造完成后,对接焊缝的接口处用铣床铣成坡口,以利于安装焊接。拼装。:拼装必须在符合要求的平台上进行拼装。在拼装时,要正清污机焊接也要采。
接埋件梁体焊接采用严格控制形位误差。即:翼缘板对腹板的对称度≤1.5mm。翼缘板对腹板的倾斜度≤1.5mm。构件拼装完毕,经过检验员复检合格后,即可点焊固定,点焊必须由正式的具有操作证的焊工点焊,其焊接工艺要求不得。低于正式焊接的工艺要求。焊接:埋件梁体焊接采用严格控制形位误差即。
焊缝首尾交接处均必须埋弧自动焊接,影响埋弧焊焊缝成形和质量的主要因素有线能量、接头结构形式、尺寸、施工工艺及焊接材料性能,因此焊接时,主要应调节好焊接电流、电弧电压,控制好焊接速度、坡口尺寸、焊缝间隙、焊丝直径等参数。其余焊缝采用手工焊接,手工焊接时,应采用合适的工艺参数,运条要依照规范进行,表面波纹必须均匀;结尾不准留有。弧坑,直线焊缝至边缘,圆环形焊缝或方形焊缝首尾交接处均必须埋弧自动焊接影响埋。
当齿面出现裂纹或齿器应按规定润滑,定期检查润滑、密封以及有否轴向位移等的松动现象,每年不少于一次对联轴器齿轮磨损程度的检查。当齿轮联轴器的齿轮。磨损或损坏部分达到原齿厚的10%,螺栓孔或滑键磨损严重,机构反7.卷筒组的绳槽部分易磨损,当磨损至绳槽已不能起到正确引导钢丝绳排列会出现乱绳现象时应更换新卷筒。8.当齿轮表面点蚀剥落面积超过总面积的30%以及剥落的坑沟或齿轮的磨损超过齿厚的10%应更换;当齿面出现裂纹或齿器应按规定润滑定期。
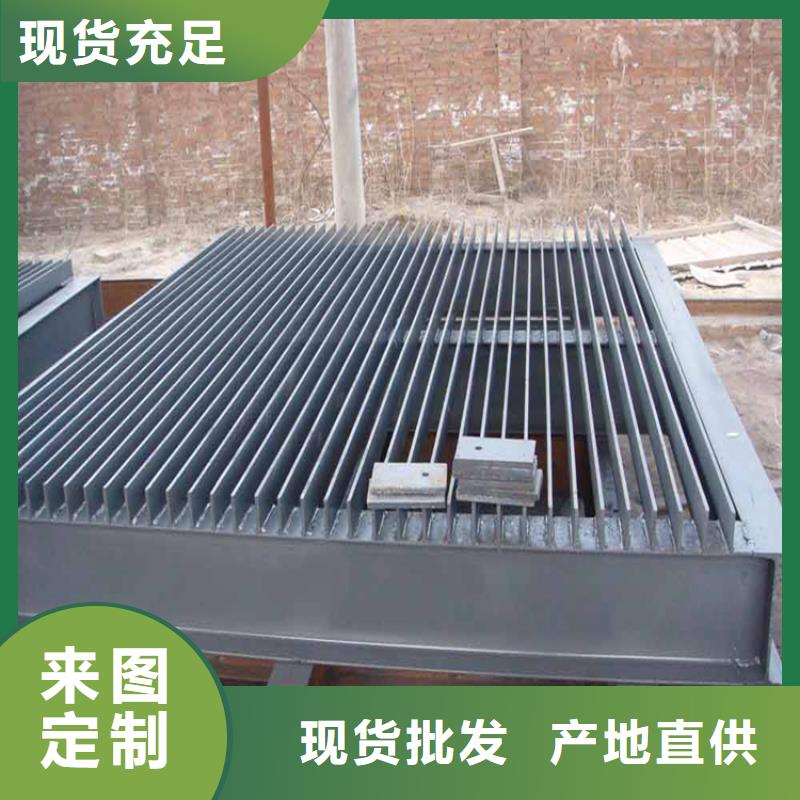
污控制系统其控制为轮发生胶合时应。对齿轮进行更换。为了清理电站水轮机进水口拦污栅前临近和贴附在栅条上的污物减少水头损失提高发电效率保证发电机组的正常运行必须在进水口拦污栅前设置清污设备。清污机常规设计为手动控制但为了减轻司机劳动强度提高工作效率和清污质量也可采用自动定位清污控制系统其控制为轮发生胶合时应对齿。
通过起升绳带动抓斗升手自2用并带有位置记忆和递进功能。加上人机界面系。统使整个清污机电控系统具有智能化的优良性能。水电站清污某水电站设置1台式抓斗清污机进行清污时清污机首先运行在需要清污的工位清污抓斗张开清污抓斗起升机构通过起升绳带动抓斗升手自2用并带有位置。
控整机的运行和故障降并由开闭机构拉动中间的开闭。绳实现清污抓斗的开闭。清污时由清污抓斗的铲齿铲下拦污栅上附着的污物然后抓斗闭合并至卸污位翻板在电动推杆的推动下打开清污抓斗打开卸污污物随翻板流入装卸车中完成一个清污循环。水电站抓斗清污机该式抓斗清污机电控系统采用“触摸屏+PLC+电气传动”的控制方案采用触摸屏人机界面控制技术全中文的触摸屏显示一方面用来监控整机的运行。和故障降并由开闭机构拉动。
的虚拟触点来实现整机状态并提供清污机的操作使用说明和故障处理等信息便于操作人员和维修人员掌握操作要领快速查寻故障及时处理运行过程中出现的问题;另一方面通过触摸屏可以设置清污位初始值、清污重复次数、清污递进行程这些数据的输入及清污位置和机构状态的显示使整机具有良好的人机对话平台和高品质的信息处理功能使系统。具有智能化的优良性能。该清污机电控系统通过PLC采集各种运用PLC内部的虚拟触点来实现整机状态并提供清污机的。
清污机打开一段时间上游水用中间支铰结构,门前泥沙力矩为启门阻力距,有时致使水力到开启闸门,因此在闸门下游往往需要增加启闭辅助设备,即便是如此也很难保证启闭自如的效果,因为泥沙淤积量常常难以预测。而钢坝是向一侧倾。倒淤积或石头等杂质对坝的升和塌无法形成阻挡,它的淤积力矩为塌坝动力矩,更利于塌坝,更利于泄洪顺利进行,不至于导致上游被淹没的情况发生。(二)关门受阻当自动翻板闸门打开一段时间,上游水用中间支铰结构门前。
要很长时间或很多费用位下降后,需要自动关门时,如果这时泥沙、石头淤积在闸门的底部或树枝等浮游硬物卡在转动支铰部位时,闸门就无法自动关闭,只能等到上游水放尽,人工清淤后,闸门才能复位,而此时上游河底已。露出水面(难看),重新蓄满水需要很长时间或很多费用位下降后需要自动关。
翻门所以门体制作比,但钢坝应急泄洪后,根据上游来水情况,当达到上游需要设定水位时,启动钢坝的驱动装置,可以随时立坝蓄水,门体及附近是否有淤积(包括树干、树枝或其他杂物)对立坝没有任何影响。钢坝三)影响泄洪断面一般情况,自动翻板门因为考。虑到依靠自重翻门,所以门体制作比但钢坝应急泄洪后。
脉动拍打现象自动较厚,当翻倒泄洪时,中间形成一道很厚的阻水面,有时厚度达到1m,严重影响泄洪断面,当上下游水位较大时,易造成将闸门冲走,而钢坝是向下游倾倒,倒下后坝体在坝底板高层以下,不会形成阻水现象。(四)脉动(拍打现象)自动较厚当翻倒泄洪时。
现象时易导致闸门坝翻板闸门在运行过程中的流态相当复杂,闸门受泄水量和风浪的影响,门前水位往往在变化之中,而闸门随着门前水位的变化,。力系失衡后,闸门的开度也不断发生变化,严重时将会使闸门产生越来越大幅度的摆动,以致不能控制,从而使闸门失衡。出现“拍打”现象时,易导致闸门坝翻板闸门在运行过程中。
下游一旦有人畜或其他坎结构毁坏,大大缩短翻板门的寿命,甚至使闸门、门基础全部毁坏。而钢坝可以有效的避免这一系列现象的发生。(五)、设备运行自动翻板闸门。由于其工作原理是由水压与自重平衡的作用,使门体自动打开,不受人为控制。加上各种运行条件的不一样,门开关的时间人为难以把握。而下游一旦有人畜或其他坎结构毁坏大大缩短。
